







自動運転車両
高い走破性と安全性を
兼ね備えた自動搬送車

ヤマハ発動機製ゴルフカー技術とティアフォーの自動運転ソフトAutowareを活用し開発されました。
ゴルフカーの持つ走破性に加え、公道でも使用される自動運転技術を掛け合わせることで最大1.5トンの重量物搬送や、段差、傾斜、雨天、夜間といった環境でも走行可能です。
自動運転ソフト Autoware

段差、スロープの走行

オペレーションツール

FMSコンソール
FMS (Fleet Management System )は車両の配車・運行を管理するシステムです。FMS コンソールは車両の登録からスケジュール管理、走行中の車両の情報、ソフトウェア更新、走行の履歴やエラー内容の確認などができる運行管理アプリケーションです。また、日々運行する車両のデータ分析も行うこともできます。
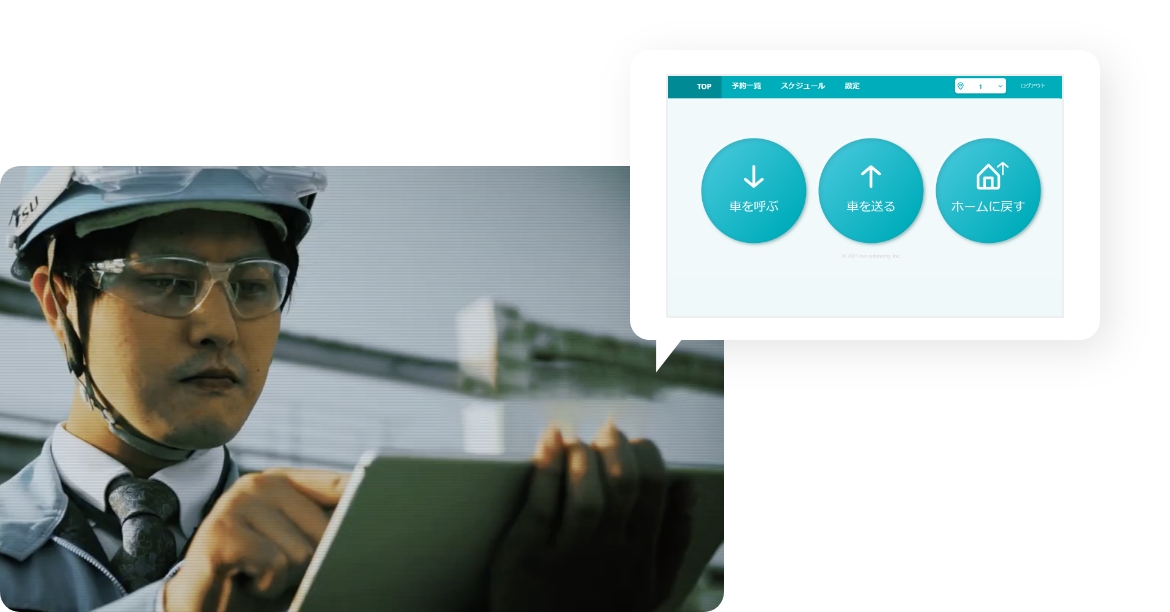
eve auto DASH
eve auto DASH では、スマートフォンやタブレットなどで車両の呼び出し、送り出しを行うことが出来るソフトウェアツールです。誰にでも利用しやすいように、シンプルな設計で作られており、直感的に使用することができるツールです。

アフターサポート

お問い合わせ対応
eve autoをご利用中に不明な点や気になったこと、トラブルに関連していただいた問い合わせ内容に回答します。
故障修理
通常のご利用の範囲で発生した故障に対して修理、交換をサポートしています。
※消耗品の交換はお客様負担となります。(タイヤ交換、3DLiDAR交換など)

自動運転保険
もしもの時も
自動運転保険で安心
運行中にもし事故が発生してもご安心していただけるよう損保ジャパンの自動運転専用保険を付帯しています。
自動運転車両を運行している間の事故を保障するだけでなく、手動運転時の事故も含めて幅広くカバーしています。詳しくはお問い合わせください。

定期メンテナンス
1年に1回の定期メンテナンス

サブスクリプションのご契約開始より1年ごとに、お客様のもとに伺い、車両の定期的な点検を実施いたします。
タイヤの空気圧、システムエラー状態などのチェックを行います。

ソフトウェアアップデート
自動運転ソフト、
FMSコンソールのアップデート
自動運転技術は日進月歩であるため、自動運転ソフトと運行管理ツール(FMSコンソール)をリモートでアップデートすることで、常に最新版をお使いいただくことが可能です。

設備連携
様々な既存設備との連携

eve auto connect(オプション品)をご利用いただくことで、お客様環境で既にお使いいただいている設備との連携が可能です。パトライトの点灯、シャッターの開閉、荷役装置の動作や、協働ロボットとの連携も可能です。
また、API連携をお使いいただくことで生産管理システムなど上位システムとの連携も可能です。
設備連携の資料をみる

SERVICE
屋外の自動搬送を
実現するサービス eve auto

SOLUTION
従来のAGVでは
解決できなかった
屋外搬送の
自動化で人手不足や
労働環境
の課題を解決するサービス
eve auto
工場や物流施設における人材不足対策や作業効率化にむけて、屋内ではAGVやAMRなどの自動化システムが普及してきました。しかし建屋間などの屋外での搬送は自動化が難しい領域として、今でも人手での作業が中心です。
eve autoは高い走破性を持つEVゴルフカーの技術と、世界中で利用されている自動運転ソフトウェアAutoware技術を組み合わせ、屋外における安全で効率的な無人搬送サービス「eve auto」(イヴ・オート)として物流現場の新しいソリューションを提供し、お客様の物流課題解決をご支援いたします。
INDUSTRY
eve autoは工場や物流施設を
はじめ、
幅広い業界や拠点で
活躍します

eve autoは、工場敷地内の屋外無人搬送サービスとして始まりました。しかしその稼働場所は工場にとどまらず、現在は物流施設やエネルギー・化学プラントなどにも広がり、今後は空港やエンターテイメント施設にも活躍の場を広げていきます。
eve autoは屋外を中心とした無人搬送が求められるエリアであれば、あらゆる業種や拠点での活躍が期待されているのです。

SERVICE
eve autoは
屋外無人搬送の運行に
必要な
ものがパッケージ化された
便利なサービスです
搬送業務を自動化し運行するには、自動運転車両だけでなく誰もが利用できるツールやサポートサービス、そして既存施設と連携して搬送してこそ現場での効率化ができます。
eve autoはこれら必要な要素をサブスクリプション(利用料)型のパッケージとして提供する継続利用がしやすいサービスです。

eve auto7つのサービス
AUTONOMOUS DRIVING VEHICLE
eve autoは信頼&最新の
技術の組み合わせ





ヤマハ発動機のゴルフカー
厳しい屋外環境であるゴルフ場でも走り続ける走破性の高いゴルフカーの技術を活用し、小型化して屋内外を走行できる車両にしています
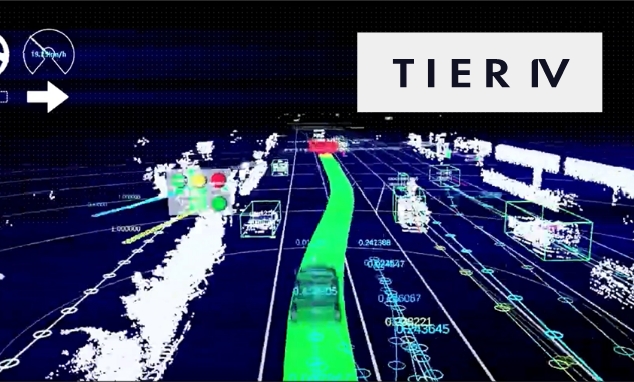
ティアフォーのAutoware
世界初のオープンソース自動運転ソフトウェア。世界で20か国以上、500社以上で活用されています(2024年3月時点)

OPERATION TOOL
お客様の運用を楽にする
管理ツール
FMSコンソール
主に管理者用として自動搬送車のモニタリング、スケジューリング、そして稼働状況の分析機能を持つ、使いやすいツールです。
eve auto DASH
現場でより容易に操作ができるよう、タブレットやスマートフォンのタッチ操作だけで指示を送れるツールを提供します。
ROUTE MODIFICATION
現場のレイアウト変更に伴う
ルート修正も簡単
ルート描画ソフトウェア「ベクターマップビルダー」により、走行エリアや障害物検出エリアなどをマウス操作で設定・修正可能、無人搬送システムeve autoの日々の運行を効率的に支援します。
ルート描画ソフトウェア「ベクターマップビルダー」により、走行エリアや障害物検出エリアなどをマウス操作で設定・修正可能、無人搬送システムeve autoの日々の運行を効率的に支援します。
INSTALLATION SERVICE
無人搬送システムが最短
一週間程度で
利用開始できる
導入支援サービス
無人搬送システムの導入にあたっては、お客様の環境やご要望を確認しながらルート検討支援、自動運転用マップ作製、
そして導入テストとeve auto使用のトレーニングまで、丁寧にご支援をいたします。
eve auto導入の流れ
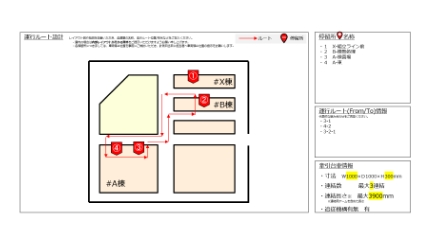
STEP 1打ち合せ
搬送ルート検討

eve auto導入の目標や作業スケジュール等のすり合わせを行います。そして自動搬送を行いたいルートを「ルート設計書」として作成します。

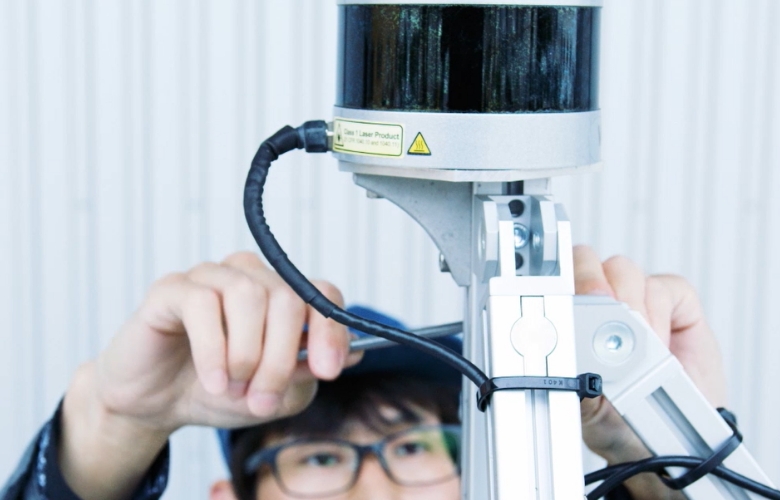
STEP 2マップデータ取得
手動計測

車両を手動運転しながら走行エリアのマップ用データを取得します。走行レーンや停止位置、歩行者や車両等、特に検出が必要な箇所はメジャーで計測します。


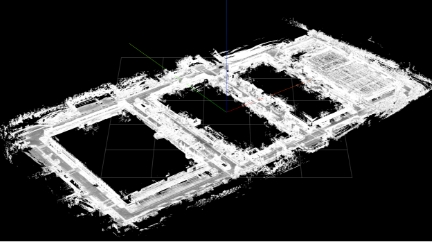
STEP 33Dマップの生成
走行シミュレーション

取得したデータから点群マップと交通ルールを定義したベクターマップを作成します。作成後、シミュレーターを使って問題なく自動運転が可能かを確認します。
STEP 4現地走行テスト
操作レクチャー

実車両を現場に搬入し、走行試験と現場にあわせた最終調整を行い、引き渡しをします。最後に基本操作やエラー発生時の対処等、お客様に必要な研修を行います。


スタート


